SafeSpeed
The SafeSpeed technology serves to prevent excessively high temperatures in microprocessors, while allowing them to run at the maximum possible speed. It is applicable to virtually any platform with dynamic voltage and frequency scaling (DVFS) like a desktop or laptop personal computer, a smartphone, a tablet, a server, an industrial controller, and so forth.
SafeSpeed is an event-based feedback control system acting on DVFS, and is suitable for both single- and multi-core devices (no matter whether a per-core or per-chip DVFS is provided).
Two are the major advances over the state of the art. First, SafeSpeed can be realized entirely in software, in hardware, or with various combinations thereof. This allows for a smooth (software) implementation in devices already designed and shipping, as well as for its zero-overhead (hardware) realization if desired. Second, no matter which implementation form is chosen, the event-based nature of the controller minimizes the number of actions (frequency variations) taken on the system, with apparent advantages as for electronic stress.
SafeSpeed proactively governs the computational performance and the dissipated thermal power, in the presence of highly variable environmental and load conditions, with the following advantages:
- it guarantees maximum speed wthout thermal constraint violation;
- it integrates seamlessly with any power/performance management scheme, with negligible overhead;
- it reduces the risk of damaging the processing unit;
- it reduces the risk of premature aging;
- it improves reliability over time.
SafeSpeed includes: a) an event generation module to decide when action is reauired; b) an event management module, that determines the control action; c) an operating module, that applies the action to the controlled device.
For maximum control performance and maximum configurability, the event generation can be hardware and the event management software. For maximum performance when configurability is not a primary issue, everything can be hardware. For minimum impact on an existing design, everything can be software .
The achieved advantages in terms of control quality were assessed by benchmark testing, see A. Leva, F. Terraneo, I. Giacomello, W. Fornaciari, “Event-based Power/performance-aware Thermal Management for High-density Microprocessors”, IEEE Transactions on Control Systems Technology, 2017, DOI 10.1109/TCST.2017.2675841. Figure 1 below compares SafeSpeed with a standard Linux solution, while figure 2 shows how, by setting the maximum reachable temperature, the controlled device can be made to operate in any intermediate point between “maximum performance” and “maximum power save”.
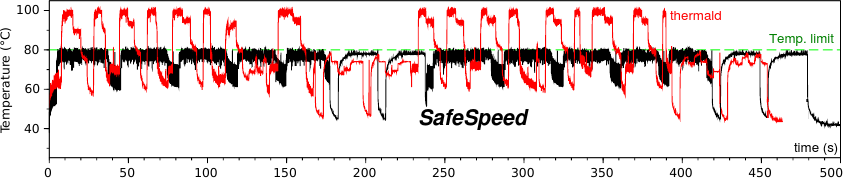 Figure 1: comparison between SafeSpeed and the Linux thermal daemon under time-varying load.
Figure 1: comparison between SafeSpeed and the Linux thermal daemon under time-varying load.
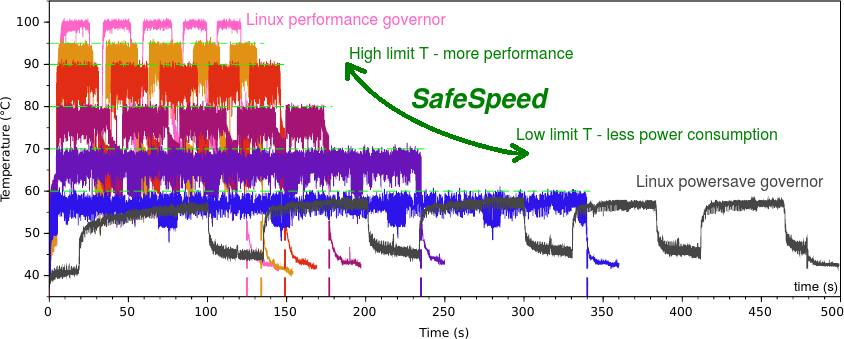 Figure 2: SafeSpeed enforcing a “performence” versus a “powersave” mode (represented by the so named Linux governors) by acting on the limit temperature.
Figure 2: SafeSpeed enforcing a “performence” versus a “powersave” mode (represented by the so named Linux governors) by acting on the limit temperature.